

This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors.
Posts:
Evaluating LIDAR Guide
LIDAR Fundamentals
SICK TiM551 – LIDAR Overview
SICK LMS111 – LIDAR Overview
SICK LMS511 – LIDAR Overview
Hokuyo UTM-30LX – LIDAR Overview
LIDAR Review Comparisons
I hope this series (and particularly the final comparison post) proves useful.
Enjoy!
SICK LMS111
The SICK LMS111 is the middle-sized product in the SICK line of LIDAR’s for robots (and I guess other things also). This sensor is a good middle compromise in features, size, and price. I would recommend this sensor for applications that need obstacle avoidance/detection or mapping at distances of less than 18 meters. This sensor really is nice in that it provides high quality in a reasonably sized package.
The 0.25 degree FOV and small spot size are good for mapping applications and penetrating through trees, dust, rain, etc..
At the base of the sensor is a breakout connector mount with punch-outs that can either have the cables coming out from the bottom or rear of the sensor. One of the connectors allows you to sync multiple sensors so that the beams do not interfere with each other as well as digital outputs that can be used for robot controls. The digital outputs can be good for making a robot stop if the higher level software fails to react to an obstacle.
I think you can get RSSI from this sensor but I was not able to.
| Range (m) | 0.5 – 20 (18 with reflectivity below 10%) |
| Field of View (degrees) | 270 |
| Angular Resolution (degrees) | 0.25, 0.5 |
| Scanning Speed (Hz) | 25, 50 |
| Range Accuracy (mm) | ±30 |
| Spot Diameter (mm) | 158 at 10m, 308 at 20m |
| Wavelength (nm) | 905 |
| Voltage (V) | 10.8 – 30 |
| Power (W) | 60 |
| Weight (lb/kg) | 2.4/1.1 |
| Durability (subjective: (poor) 1 – 5 (excellent)) | 5 (It is IP67) |
| Output Interface | Serial, CAN, Ethernet |
| Other | Returns up to 2 echos. |
| Cost (USD) | ~5,700 |
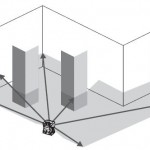
Here is an image showing the field of view and range for this sensor:

As a reminder please Click Here to see the final test results from this LIDAR!
I would like to thank SICK for lending me several LIDAR sensors for this review.
Disclaimer: I am only borrowing this LIDAR and will return it when I am done with this evaluation. I have received no money or goods from the company in exchange for this review.


Pingback: Evaluating LIDAR Guide | Robots For Roboticists
Pingback: SICK TiM551 - LIDAR Overview | Robots For Roboticists
Pingback: Hokuyo UTM-30LX - LIDAR Overview | Robots For Roboticists
Pingback: LIDAR Fundamentals | Robots For Roboticists
Pingback: LIDAR Review Comparisons | Robots For Roboticists
I need Calibration guidelines for LM111 type sensors.
Installation of these sensors are at Gantry cranes for detecting material or anybody standing on rail.
We purchased the crane from Danieli and these sensors are not commissioned ,as a safety issue we are not able to operates the crane till sensors will be online.
Please give also the contact details of the representative in UAE.
Hi
Without hearing more about your application I can not give specific calibration advice. The general idea for these applications is figure out the distance that people should not be from the sensor and set that as your stop zone. If you are using a safety rated SICK they are designed to have different zones that you configure in the sensor.
Some of the sensors have a digital line that can be used for turning devices on or off direct from the LIDAR.
I would recommend contacting SICK or your vendor for help configuring your sensor.