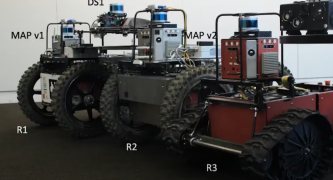
Hi all, This is a new series looking at the detailed design of various robots. To start with we will be looking at the design of two different robots that were used for the DARPA Subterranean Challenge. Both of these robots were designed for operating in complex subterranean environments, including Caves, Mines & Urban environments. […]
Hi allA few years ago I did a teardown of the classic LMS 291 “brick” that was common on many early robots. Now I had the chance to open up a newer much smaller TiM-100 LIDAR sensor. Lets see how things have changed. See the video below to learn about the SICK TiM sensor. To […]
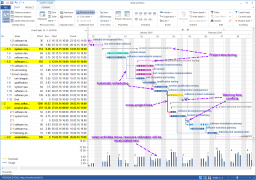
Successful projects tend to have schedules that work (as well as budget, but that is for another time). This schedule should be made at the start of the project and actively maintained throughout the project. On large projects this may mean having a dedicated person to maintain and track the schedule. I would generally recommend […]
Automate is my favorite trade show to attend each year. While there are many conferences that are academic in nature (IROS, ICRA, etc..), this show is geared to actually building and deploying of robotics. Over 725 vendors show up to exhibit to show off everything from motors, fleet management software, grippers, wheels, UGVs, IMRs, bearings, […]
This post is part of the Hands on Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Once we had a drone we needed the sensors and computer to make this drone operate. Keeping with the idea of trying to make […]
This post is part of the Hands on Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. The drones designed for the DARPA SubT challenge needed to be great at flying through tunnels and exploring unknown subterranean environments. The plan was […]
Hi This morning I got the news that a friend, mentor and colleague for the past 17 years has passed away. I wanted to share a few lessons from Jim. Never be satisfied and always seek perfection, yet also know when a robot is ready to test. Think about your work. If you did something […]
Just sharing this announcement with the Robots for Roboticists community. I have not had a chance to use this yet. I know I generally only share things that I have used, but I felt this was worth sharing. If you try it out, let us know how it works. Announcing Quad-SDK! A full-stack quadruped control […]
This is functional dictionary for roboticists, and not a proper dictionary. The goal of making this is to define terms from within the research and engineering world in an easy to understand manner. Try to read through this list to test your robotics terminology. This is a work in progress and I will be continuing […]
I generally try and use Copley motor controllers whenever I can. This is for several reasons including: Reliability Linux software API (for a small fee) which can easily be wrapped for using in ROS Copley, if you are reading this you should make CML available to everyone for free… Same software API for a wide […]
Radios are used for different things; data, audio, video, etc.. In robotics they are most often used for transmitting data wirelessly. There are many different types of radios available to choose for your robotic system. There are probably hundreds of individual radios to choose from. This post will look at some of the different categories. […]
I recently had an opportunity to take apart a Fiber Optic Gyro (FOG). I have always known the theory behind a FOG and that there was a fiber optic cable that was used as the sensing element, however I was not prepared to actually see the fiber optic cable in the sensor. The unit I […]
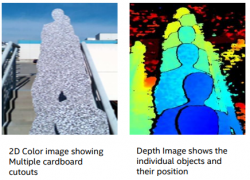
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Sensor Selection Based on the system requirements we determined that we needed RGBD cameras in all four directions to help find required artifacts […]
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Check out the post below for some pro tips on getting better support when talking with motor controller vendors. Motor Controls We used […]
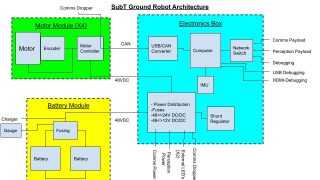
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Power System The power system of the robot is key for making everything move and for powering all of the sensors and computers. […]
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Robot Size Decision After we have the list of system requirements we start with the design of the mechanical structure of the robot. […]
As soon as I saw this book existed on Amazon, I instantly wanted to read it. It is not often that I see a book dedicated to the detailed engineering design of a complex robotic system. The Design and Engineering of Curiosity: How the Mars Rover Performs its Job by Emily Lakdawalla did not disappoint. […]
A colleague of mine who wishes to remain anonymous recently heard somebody say that hardware was the easy part of robotics. In response to that he wrote this email/poem. (I am calling it a poem, he did not). (I made a few small changes to protect anonymity) I fully understand why many people think that […]
The Intel Realsense L515 is a nice little LIDAR Depth Camera. Intel is planning on discontinuing this sensor in early 2022, however I have an old one that I want to tear apart. I am not adding much text to this, I am mostly just sharing the images. Please discuss any parts you can identify […]
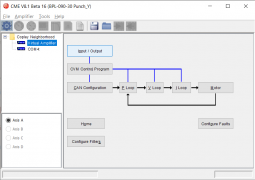
Often we need to communicate with motor controllers from different vendors. Writing software drivers for each one can be a pain and time consuming. Other times we need to use motor controllers utilizing EtherCAT or CANopen, but talking to those drives from our computers is difficult to implement. One solution is using a motion coordinator […]
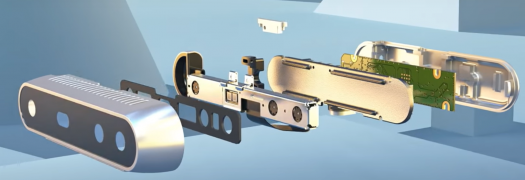
The Intel RealSense D435 is nice little depth camera. So naturally I want to tear it down and see what is inside of it. Also I have seen many cases where if the the camera is used outdoors dust can get inside on the lenses and affect image quality. I have also seen the internal […]
Note: I have been using these cameras for the past 2 years or so. They are great for research, but I do not recommend them for commercial applications due to USB reliability issues. The Intel RealSense cameras have been gaining in popularity for the past few years for use as a 3D camera and for […]
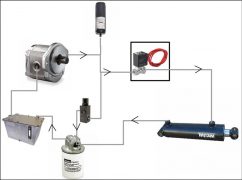
Hydraulics are sometimes looked at as an alternative to electric motors. Some of the primary reasons for this include: Linear motion Very high torque applications Small package for a given torque Large number of motors that can share the reservoir/pump can increase volume efficiency You can add dampening for shock absorption However there are also […]
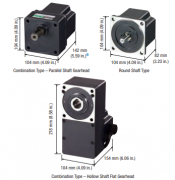
I really like the Oriental Motor motors and gear boxes. The motors work well and they have nice gearbox configurations. In particular I like these for driving wheels on medium size robots. While I really like the products, the company support is lacking. In particular they will not give out the wiring instructions or detailed […]
I had somebody ask me questions this week about underwater photography and videography with robots (well, now it is a few weeks ago…). I am not an expert at underwater robotics, however as a SCUBA diver I have some experience that can be applicable towards robotics. Underwater Considerations There are some challenges that exist with […]
Lithium battery safety is an important issue as there are more and more reports of fires and explosions. Fires have been reported in everything from cell phones to airplanes to robots. If you don’t know why we need to discuss this, or even if you do know, watch this clip or click here. I am […]
I recently attended the National Robot Safety Conference for Industrial Robots and found myself confused with all of the safety standards. Here is the sheet that they provided to help identify Standards, Abbreviations, Codes & Titles. If you find any of these interesting and wish to purchase the standards you can go to the Robot […]
I had the opportunity to attend the National Robot Safety Conference for Industrial Robots today in Pittsburgh, PA (USA). Today was the first day of a three-day conference. While I mostly cover technical content on this site; I felt that this was an important conference to attend since safety and safety standards are becoming more […]
Kvaser reached out to me about writing a sponsored post to put on this site. I have used many Kvaser CAN interfaces in the past. Since they work well and are reliable I agreed. I also dont know anything about CCP/XCP; so this should be interesting. This is my first time accepting a sponsored post […]
Hi all I was recently asked about the differences between RADAR and LIDAR. I gave the generic answer about LIDAR having higher resolution and accuracy than RADAR. And RADAR having a longer range and performing better in dust and smokey conditions. When prompted for why RADAR is less accurate and lower resolution I was asked […]