
Hi all
Many people get confused between what drawbar pull is and what rim pull is. Many people also use the terms interchangeably.
Drawbar Pull – Pull available from the vehicle (think pulling from a hitch in the rear of the robot)
Rim Pull – Pull available at the rim of each driving wheel (some people say it is from all wheels combined)
For both of these tests they are typically done on a level surface with your given operating terrain. The results you get with sand would be very different then what you get on cement which is also very different from what you get in snow.
To measure drawbar pull you can typically tie a rope to the center rear of the vehicle (near where a hitch would go) and attach the other end of the rope to an adjustable load. This adjustable load can either be a programmable load (such as a particle brake) or actual physical weights that are added. At the most basic level this will tell you how much the robot can pull. In practice we look at the amount of slip exhibited by the wheels for different loads. To do this we need to have an independent way of determining robot position, this is often done with a long string potentiometer or a total station. See this post for more information on drawbar pull testing.
Rim pull is harder to measure in many cases. The easiest way is if a force sensor is integrated into the robot to measure force on the wheel. The other way to do this is to drag a wheel through your desired surface and measuring those forces on the wheel (as opposed to on the robot itself).
Hope this clears up drawbar pull vs rimpull.
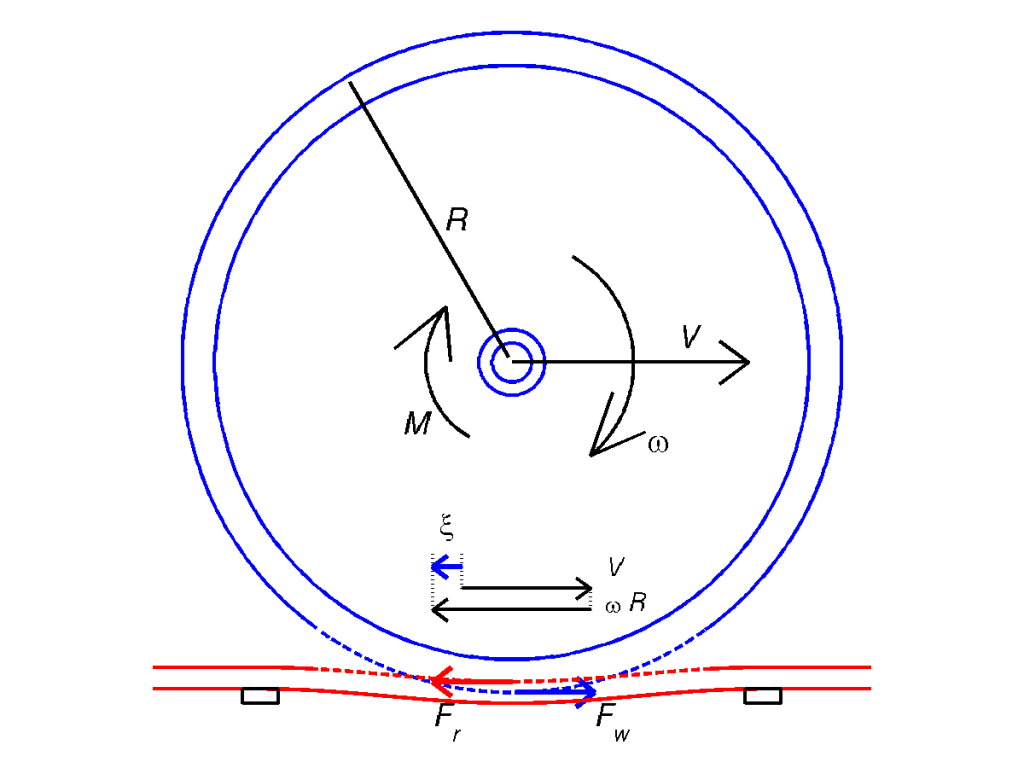
Image source: http://upload.wikimedia.org/wikipedia/commons/1/1a/Illustration_of_creepage_for_a_railway_wheel.png


