Posted inElectrical & Electronics
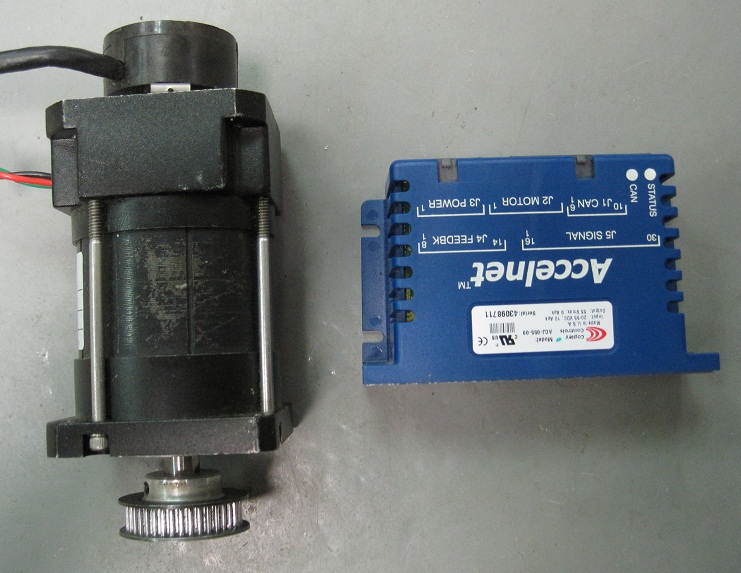
Setup & Configuring a Copley Motor Controller
I generally try and use Copley motor controllers whenever I can. This is for several reasons including: ReliabilityLinux software API (for a small fee) which can easily be wrapped for using in ROS Copley, if you are reading this you should make CML available to everyone for free...Same software API for a wide range of different controllers (AC, DC, brushed,…