Hi all Click here to see initial reactions after the event! RoboUniverse 2015 is happening May 11-13 in New York. I plan on being there and would love to meet up with others who are there. Please let me know if you plan on attending. I am waiting to see the full exhibitor list as […]
One thing that is often looked is lubrication (lube). Changing your lubrication and selecting the proper type can dramatically modify the performance of your system. This change of lubrication was one of the primary reasons MSL was delayed from launching to Mars. Improper lubrication can cause your mechanical parts to wear out and fail. It […]
Hi all Today I have a Panasonic Toughbook CF-18 that I will have the opportunity to tear down and see just what makes these computers so rugged. Please keep reading for the details of scan through for some nice pictures (you can click an image for the larger version). The computer weighs 4lb 10.8 oz […]
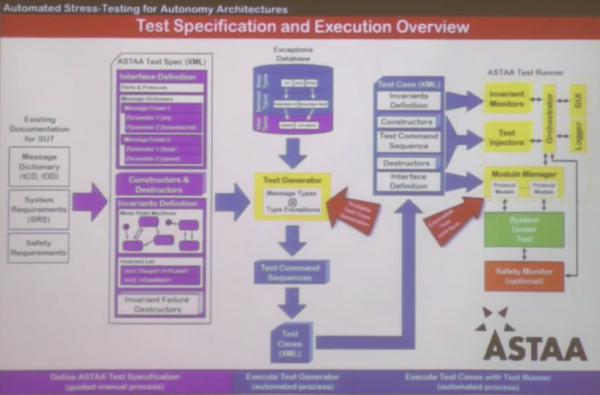
Hi all I recently had the opportunity to hear a talk from a colleague that I have worked with many times over the last bunch of years. The talk was all about how to build safe and robust systems. This is a critical topic that we often pass-over but needs to be addressed if robots […]
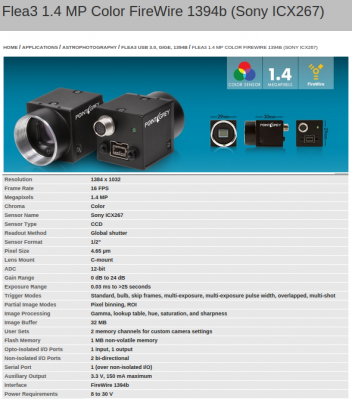
Choosing a camera for your robot or machine vision system can be confusing. It is important to determine your requirements and then figure out how to achieve that between the camera and the optics. The first thing that most people talk about is resolution. The classic resolution of a camera is based on pixels; such […]
Throughout my career I have had to ship different robots to different locations around the world. Here is a little bit about what I have learnt about transportation. The 3 basic ways for a robot to travel are by land, by air, and by sea. Typically by truck (I guess there are also trains, but […]
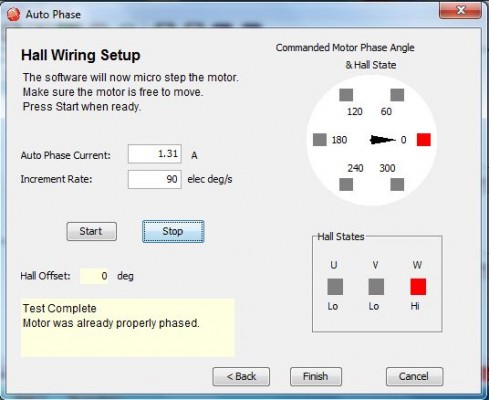
This is just a quick post on controlling DC brushless motors with no encoders. This post applies to brushless motors that typically use hall sensors for commutation. This post does not apply to the hall-less ESC (electronic speed control) motors that typically run at very high speeds and are used for things such as quadcopters […]
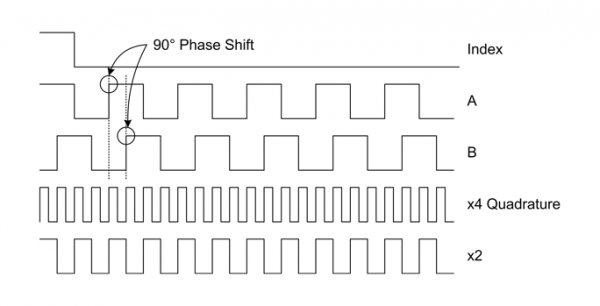
Hi all Just a quick post on incremental encoders. Incremental encoders are good for speed control and can be used for position control when we have a homing routine to get absolute position, or the system is constrained to less than one rotation. One way an incremental encoder can also be an absolute encoder is […]
Hi all Today I want to talk about batteries. However before I begin there are a few terms I want to clarify. So here we go. Terminology Cell – This is where the chemical reaction takes place which produces electricity. The characteristics of the cell are determined by its chemical formulation and its construction. Battery […]
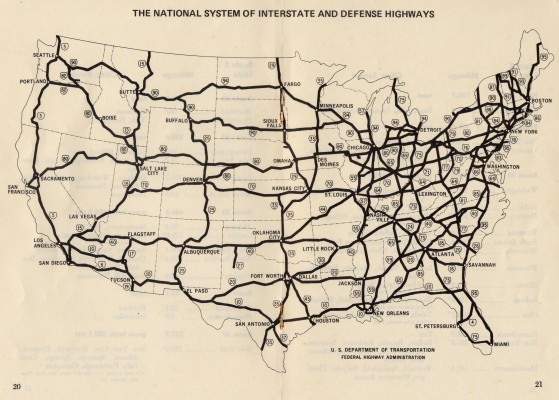
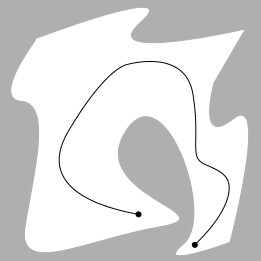
This post is going to be a summary of the different path planning (ie. route finding) algorithms that are commonly used. I am not going to detail any of the particular algorithms, but rather give you a launchpad for finding a suitable algorithm for your application. You should remember that often you will mix and […]
There are a bunch of confusing powers involved when we look at motors, especially with DC brushless motors. When your boss comes and asks you to measure the electrical power that your motor is using, it is often not straight forward. Typically the easiest way to get the current used by a motor is to […]
Ground loops are often discussed but less often understood (I am far from being an expert in this). I have seen several cases where a robot malfunctioned or a sensor did not work due to bad grounding. For example if you have a 0-5V signal and also have a “noisy” ground then the signal can […]
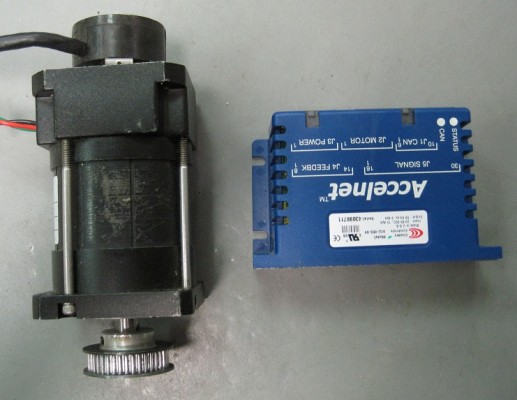
Update: Click here to learn how to configure Copley motor drivers Hi allThis is a post about the Copley Controls motor controllers. For this review I will be using a ACJ-055-09 (55Vmax and 9Apeak) motor controller (I love when product names mean something useful) with a 3 phase DC brushless motor. This is a good […]
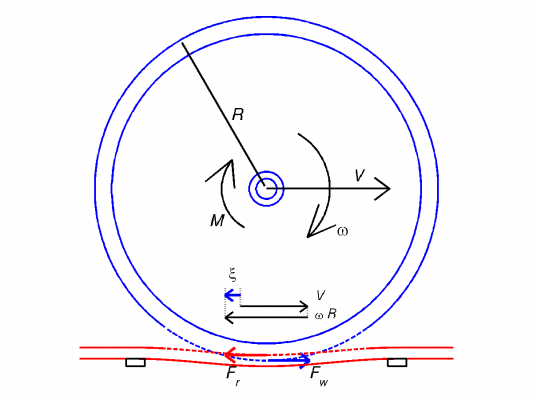
Hi all Many people get confused between what drawbar pull is and what rim pull is. Many people also use the terms interchangeably. Drawbar Pull – Pull available from the vehicle (think pulling from a hitch in the rear of the robot) Rim Pull – Pull available at the rim of each driving wheel (some […]
There has been a lot of talk recently about for-profit education. Most of it is negative and a lot of it is true, however there are also some good things about for profit education that is often overlooked. This post is about the good, the bad, and the ugly that I have experienced at a […]
For many robots the wheels are an afterthought however they are essential for letting the robot drive around. Another thing that is often neglected is choosing the proper grousers for your wheel. Most of the design parameters for wheels and grousers are based on experience, intuition (which may or may not be correct) and qualitative […]
Hi allPID controllers are the workhorse of the controls world. PID controllers have the goal of taking some error in your system and reducing it to 0. While there are many other control strategies out there PID is probably the most common (unless you count human control) outside of just setting a setpoint. There are […]
Hi This is going to be a very short post about a Ubuntu boot issues (I know, very sexy topic). Many of the robots I work on are running Ubuntu and this is a very annoying “feature” that you might want to disable. The problem with versions of Ubuntu from the past few years is […]
Hi all Here are a few soldering tutorials that might be of interest to you. These first two are your day-to-day standard soldering methods. There are many of these types of videos online. This next set of tutorials is for high reliability “proper” soldering techniques. This is actually why I am writing this post. These […]
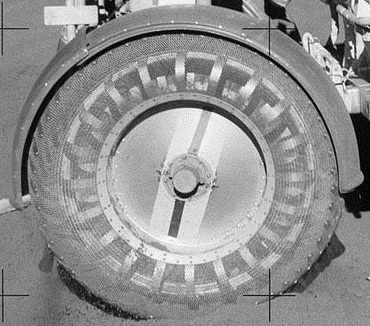
Hi all It is surprisingly hard to find a list of the technology used in the mars rovers. Here is a quick post summarizing some of the technology used in the NASA JPL Mars rovers. The list is only partialy complete since I do not have all of the information. Please leave comments below to […]
Hi all There are many different types of sensors that can be used for monitoring environmental data. In this post I will focus on natural environmental sensors. By natural I mean I mostly naturally occurring phenomena such as sunlight and temperature. I will mostly ignore things like chemical detection and radiation (the bad kind) detection. […]
Hi all So I got a question about what I bring to the field with me when I am taking a robot out for testing. The simple answer is everything that I might need. Here is a list of the basics that a carry with me. I have a box labeled Computer Recovery Kit that […]
Tracking the position of a robot is difficult to do accurately, especially when you need to track position in a variety of locations. GPS is not accurate for small movements and can have jumps as the position estimate changes. One good solution is the Leica Total Station. The Total Station can measure a robots position […]
One of my personal interests is in disaster robotics. I like them for two reasons. The first is that I like the idea of being able to try and save people (I know I could have become a doctor). The other reason I like robots is that they need to operate in “extreme terrain and […]
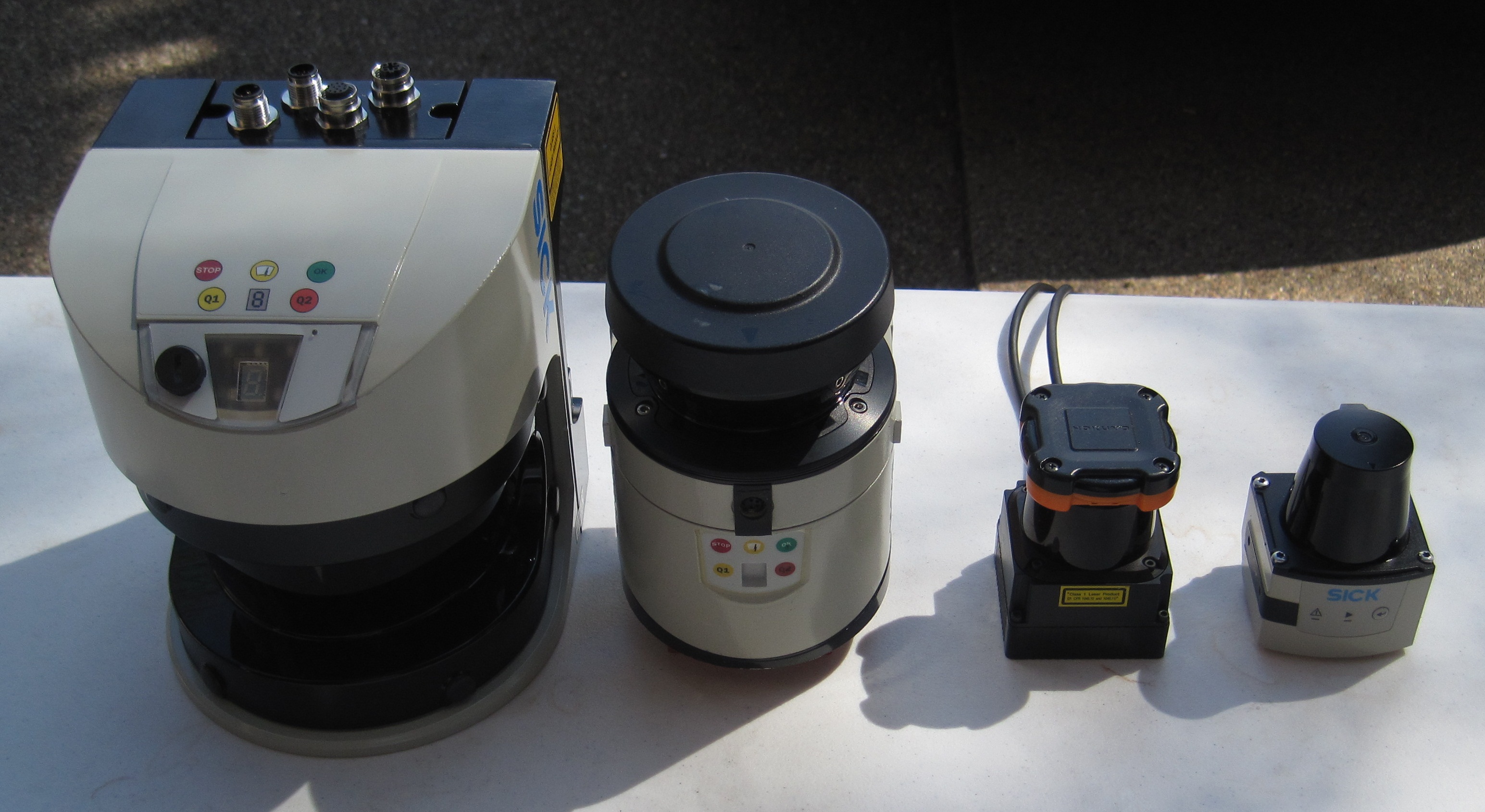
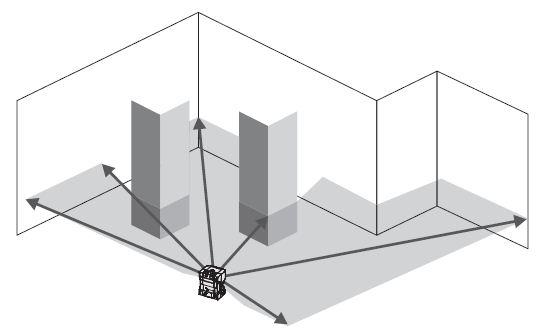
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]