I recently found a SICK LMS291 in the trash (dumpster diving time!). It is a bit of an older model as it was manufactured in August 2000, however the fundamentals should be similiar to the current generation of sensors. If you look at robots from that era you will often see them covered in this […]
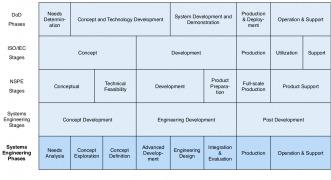
Systems engineering is the part of project management that deals with defining and developing a system (as opposed to contracts and resource allocation). Systems engineering provides the background and definitions so that the next step of project execution can occur. Often there is a cyclical process of looking at requirement definitions from the systems engineer […]
What is a control system? A control system alters the future state of its system to a more desirable outcome. We often work with feedback control systems (also called closed-loop control), where the result of the command is fed back into the control system. In particular we are looking for the error between the command […]
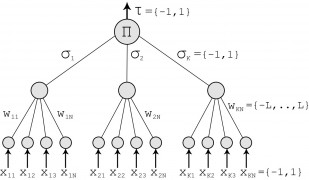
There are many terms that are thrown around about machine learning. But what do they all mean? and what are the differences? Lets start with machine learning. Machine learning “gives computers the ability to learn without being explicitly programmed” (Arthur Samuel, 1959). Machine learning is a large and complex field with many algorithms that mostly […]
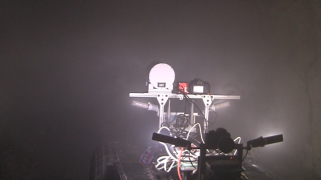
I recently had the fortune to attend a talk titled Multi-Modal Data for Perception in Smoke-Filled Underground Mines by Joe Bartels. It was an interesting talk about pushing sensor technology into difficult environments that can have smoke, dust or fog . The following are notes that I took during the talk, as always I add […]
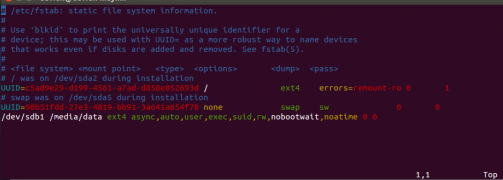
We often want to add an external hard drive to our robots in order to have a dedicated drive for data collection. Having the dedicated drive lets the primary drive remain uncluttered, have less wear-and-tear, split logging between drives for performance, and potentially be a larger spinning disk (as opposed to an expensive SSD). It […]
I listen to several podcasts, including The Amp Hour, Embedded, and the Engineering Commons. A recent (depends when you read this) Engineering Commons podcast was all about bearings. I have been wanting to write a bearings post for a while so I am using their podcast (with permission) as a basis for writing this post. […]
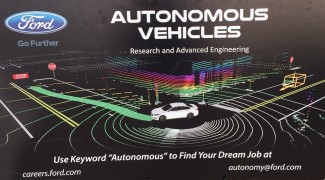
Today I had the chance to see a Ford Fusion self driving car. With all of the recent news it is easy to forget that Google and Uber are not the only players in this game. Most large auto manufacturers have a self driving car program, including Ford. Ford is already testing their self driving […]
Some people swear that all tethers are bad. Some people recommend attaching a tether to robots in order to provide power (to save the mass and volume of the batteries), for reliable fast communications, transfer of pressure or fluid, to track a robots position, or as a safety harness (in case the robot needs to […]
In life as well as in computer vision, context is critical. Scroll through this post slowly and don’t cheat. What do you see in the image below? Now what do you see in this next picture? Keep Scrolling How about this picture, can you now identify the images above? How did you identify the car? […]
The Car Hacker’s Handbook A Guide for the Penetration Tester is a really interesting book about how to interface with cars to read from onboard systems, spoof devices, and control the vehicle on your own. One of the reasons I really like this book is that it is easily the best book I have ever […]
I have had a bunch of questions from friends about how the Uber self driving car works. The simple answer is that I don’t know. I have no relation to, or inside knowledge of what Uber is doing. However I can look at the outside of the vehicle and try to guess what sensors I […]
Time synchronization is something that affects many robots. As robots have more computers and more sensors keeping everything in sync becomes increasingly important. Trying to look through log files where all of the times are skewed is not fun and makes processing difficult. Merging sensor data together with GPS can also be disastrous if the […]
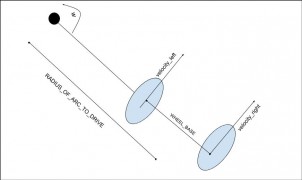
In the past we have looked at wheel design and the kinematics of skid steer and mecanum wheels. In this post we will take a quick look at different types of mobility types (ie. wheels, tracks, and how to connect them) for drive selection. I know the items in this list are not direct comparisons. […]
Recently I have been doing a lot of field work and have seen a lot of people looking for random things or asking people if they had those items. In many of those cases I had the items they needed. This is not because I am great or anything, this is from building up my […]
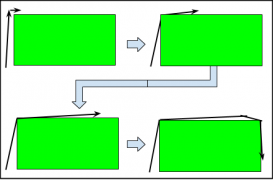
Hi all I am often in need of the basic kinematic motion equations for skid steer vehicles. I have also recently been working with mecanum wheeled vehicles. The skid steer equations are fairly simple and easy to find, however I will include it in different versions and include a ROS approach. The mecanum wheel equations […]
Hi all Recently I went to a seminar about design thinking. Design thinking is an approach to solving a problem from any domain. During the seminar people used design thinking to analyze how to automate password recovery, lead a finance team, build an activities team, and others. I used this as an exercise to look […]
I have been part of many software teams where we desired to do code reviews. In most of those cases the code reviews did not take place, or were pointless and a waste of time. So the question is; how do you effectively conduct peer reviews in order to improve the quality of your systems. […]
Hi When building a new robot the mechanical engineers always ask me how close can the different antennas be to each other. It is not uncommon to try squeezing 5+ antennas on a single robot (GPS, GPS2 for heading, RTK, joystick, e-stop, communications, etc..). So what is the proper response? The real answer is that […]
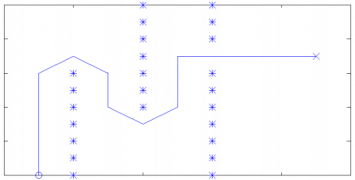
Hi all Back in 2010 I was taking an AI class where we learned about Rapidly Exploring Random Trees for motion planning. For my final project I developed an adaptive version of the RRT that I named ARRT. I decided to post it here to share with others. The post below is based from the […]
Mastering ROS for Robotics Programming is a good book that will help you learn ROS and take advantage of some of the powerful nodes (programs) that are out there. The book covers both a 7 DOF robot arm and a differential drive robot throughout the different chapters. That should really help you out no matter […]
Hi all Every time I need to add multiple USB devices to a computer I get nervous and dread the architecture. The problem is when a computer boots it automatically brings up USB devices in whatever order it sees fit (think crazy race conditions). So if you have a motor controller, a camera, and a […]
I get many questions from people about how I think kids and adults should get started in robotics, how they should progress, and what they should buy, to learn about robotics. Here is my quick response: I think level 1 is for people older than 12-13. Level 2 is for people older than 15, and […]
Hi all I wanted to write a quick post today about where to place fuses and how to protect your robot. When you design a system it is often tempting to place a fuse on every component. This idea is fine for most batteries, sensors, and computers. However this can really cause destruction when you […]
Practical Field Robotics: A Systems Approach by Robert H. Sturges, Jr. from Virginia Tech is an interesting book about how to design a field robot from a high level systems approach, and how to build a robotic lawnmower. This book has 2 primary sections. The first part of the book looks at 3 different example […]
Hi all Running Linux on your embedded system can be great for giving you a stable base, lots of tools, and you can often solve problems with a quick google search. I define embedded as any custom-built computer system, not only tiny devices. In many cases you can develop on the computer itself for ease […]
Hi all Continuing on with posts from the recent RoboUniverse show in New York, I want to talk about Robots, Jobs, and Education. On the last day one of the primary talks was from Dennis Kambeitz at EZ-Robot. The topic was Preparing our workforce for a robotic world. I am going to try to hit […]
Hi all I attended the last day (5/13/2015) of the RoboUniverse conference and exhibit in New York City. It was a good experience and I got to hear some interesting talks. I am usually deeply involved in the technical aspects of robotics, so it was interesting hearing about some of the other aspects. This was […]
Hi all Today I am reviewing Implementation of Robot Systems by Mike Wilson. This is a book about how to integrate robots into the manufacturing process. In this book Mike Wilson takes you through the process of deploying and developing your robotic systems since “All successful projects require a methodical approach to project planning.” By […]
Hi all I have often thought about what the proper software methodology should be for the various robots that I build. My thoughts have evolved over time as I have seen these tool work. I do not have any formal software engineering training, however these are things that I have seen, heard, read, etc.. that […]