Hi allA few years ago I did a teardown of the classic LMS 291 “brick” that was common on many early robots. Now I had the chance to open up a newer much smaller TiM-100 LIDAR sensor. Lets see how things have changed. See the video below to learn about the SICK TiM sensor. To […]
This post is part of the Hands on Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Once we had a drone we needed the sensors and computer to make this drone operate. Keeping with the idea of trying to make […]
This post is part of the Hands on Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. The drones designed for the DARPA SubT challenge needed to be great at flying through tunnels and exploring unknown subterranean environments. The plan was […]
I recently had an opportunity to take apart a Fiber Optic Gyro (FOG). I have always known the theory behind a FOG and that there was a fiber optic cable that was used as the sensing element, however I was not prepared to actually see the fiber optic cable in the sensor. The unit I […]
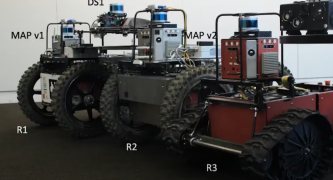
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Sensor Selection Based on the system requirements we determined that we needed RGBD cameras in all four directions to help find required artifacts […]
Hi all, This is a new series looking at the detailed design of various robots. To start with we will be looking at the design of two different robots that were used for the DARPA Subterranean Challenge. Both of these robots were designed for operating in complex subterranean environments, including Caves, Mines & Urban environments. […]
As soon as I saw this book existed on Amazon, I instantly wanted to read it. It is not often that I see a book dedicated to the detailed engineering design of a complex robotic system. The Design and Engineering of Curiosity: How the Mars Rover Performs its Job by Emily Lakdawalla did not disappoint. […]
The Intel Realsense L515 is a nice little LIDAR Depth Camera. Intel is planning on discontinuing this sensor in early 2022, however I have an old one that I want to tear apart. I am not adding much text to this, I am mostly just sharing the images. Please discuss any parts you can identify […]
Often we need to communicate with motor controllers from different vendors. Writing software drivers for each one can be a pain and time consuming. Other times we need to use motor controllers utilizing EtherCAT or CANopen, but talking to those drives from our computers is difficult to implement. One solution is using a motion coordinator […]
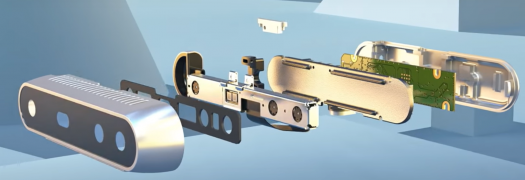
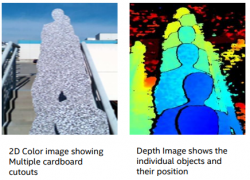
The Intel RealSense D435 is nice little depth camera. So naturally I want to tear it down and see what is inside of it. Also I have seen many cases where if the the camera is used outdoors dust can get inside on the lenses and affect image quality. I have also seen the internal […]
Note: I have been using these cameras for the past 2 years or so. They are great for research, but I do not recommend them for commercial applications due to USB reliability issues. The Intel RealSense cameras have been gaining in popularity for the past few years for use as a 3D camera and for […]
I had somebody ask me questions this week about underwater photography and videography with robots (well, now it is a few weeks ago…). I am not an expert at underwater robotics, however as a SCUBA diver I have some experience that can be applicable towards robotics. Underwater Considerations There are some challenges that exist with […]
Kvaser reached out to me about writing a sponsored post to put on this site. I have used many Kvaser CAN interfaces in the past. Since they work well and are reliable I agreed. I also dont know anything about CCP/XCP; so this should be interesting. This is my first time accepting a sponsored post […]
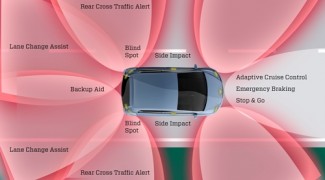
Hi all I was recently asked about the differences between RADAR and LIDAR. I gave the generic answer about LIDAR having higher resolution and accuracy than RADAR. And RADAR having a longer range and performing better in dust and smokey conditions. When prompted for why RADAR is less accurate and lower resolution I was asked […]
I recently found a SICK LMS291 in the trash (dumpster diving time!). It is a bit of an older model as it was manufactured in August 2000, however the fundamentals should be similiar to the current generation of sensors. If you look at robots from that era you will often see them covered in this […]
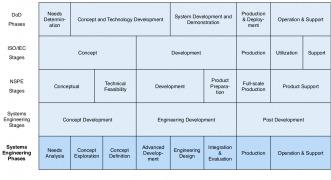
Systems engineering is the part of project management that deals with defining and developing a system (as opposed to contracts and resource allocation). Systems engineering provides the background and definitions so that the next step of project execution can occur. Often there is a cyclical process of looking at requirement definitions from the systems engineer […]
What is a control system? A control system alters the future state of its system to a more desirable outcome. We often work with feedback control systems (also called closed-loop control), where the result of the command is fed back into the control system. In particular we are looking for the error between the command […]
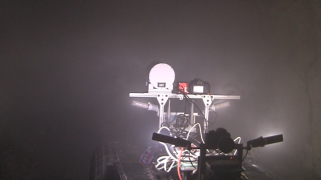
I recently had the fortune to attend a talk titled Multi-Modal Data for Perception in Smoke-Filled Underground Mines by Joe Bartels. It was an interesting talk about pushing sensor technology into difficult environments that can have smoke, dust or fog . The following are notes that I took during the talk, as always I add […]
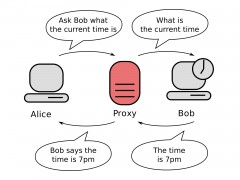
Time synchronization is something that affects many robots. As robots have more computers and more sensors keeping everything in sync becomes increasingly important. Trying to look through log files where all of the times are skewed is not fun and makes processing difficult. Merging sensor data together with GPS can also be disastrous if the […]
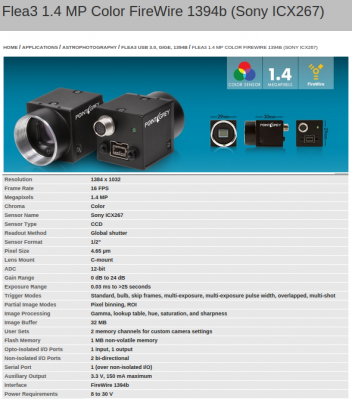
Choosing a camera for your robot or machine vision system can be confusing. It is important to determine your requirements and then figure out how to achieve that between the camera and the optics. The first thing that most people talk about is resolution. The classic resolution of a camera is based on pixels; such […]
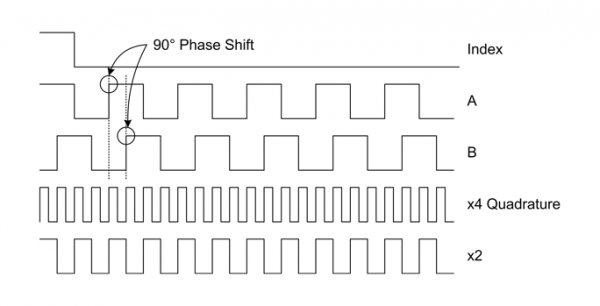
Hi all Just a quick post on incremental encoders. Incremental encoders are good for speed control and can be used for position control when we have a homing routine to get absolute position, or the system is constrained to less than one rotation. One way an incremental encoder can also be an absolute encoder is […]
Hi allPID controllers are the workhorse of the controls world. PID controllers have the goal of taking some error in your system and reducing it to 0. While there are many other control strategies out there PID is probably the most common (unless you count human control) outside of just setting a setpoint. There are […]
Hi all There are many different types of sensors that can be used for monitoring environmental data. In this post I will focus on natural environmental sensors. By natural I mean I mostly naturally occurring phenomena such as sunlight and temperature. I will mostly ignore things like chemical detection and radiation (the bad kind) detection. […]
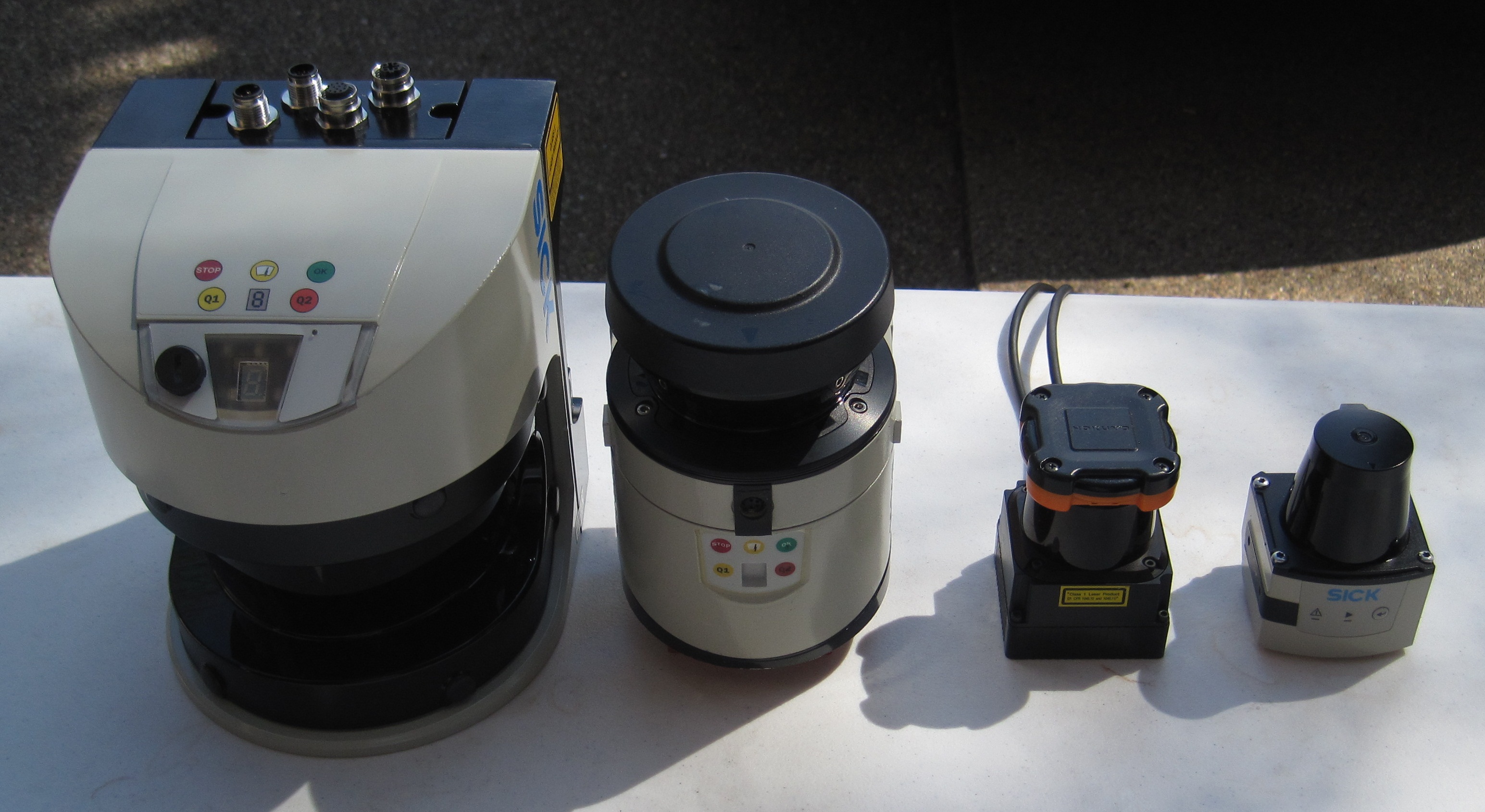
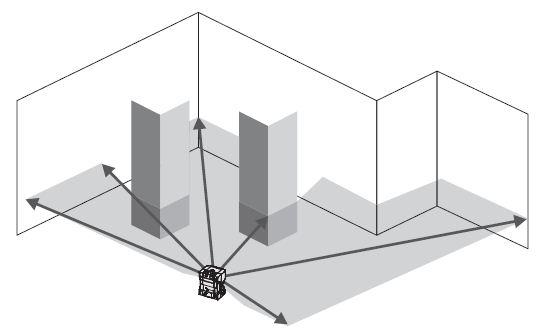
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]
This is part of a series of posts talking about some of the common LIDAR’s used in robotics. At the end of these sensor profile articles there will be a final post that compares the sensors based on data collected by each of the sensors. Posts: Evaluating LIDAR Guide LIDAR Fundamentals SICK TiM551 – LIDAR […]