This post is part of the Hands on Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Once we had a drone we needed the sensors and computer to make this drone operate. Keeping with the idea of trying to make […]
This post is part of the Hands on Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. The drones designed for the DARPA SubT challenge needed to be great at flying through tunnels and exploring unknown subterranean environments. The plan was […]
I generally try and use Copley motor controllers whenever I can. This is for several reasons including: Reliability Linux software API (for a small fee) which can easily be wrapped for using in ROS Copley, if you are reading this you should make CML available to everyone for free… Same software API for a wide […]
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Sensor Selection Based on the system requirements we determined that we needed RGBD cameras in all four directions to help find required artifacts […]
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Check out the post below for some pro tips on getting better support when talking with motor controller vendors. Motor Controls We used […]
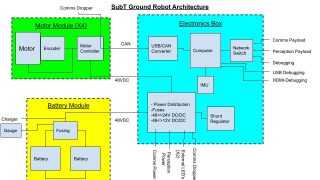
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics https://robotsforroboticists.com/hands-on-ground-robot–drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Power System The power system of the robot is key for making everything move and for powering all of the sensors and computers. […]
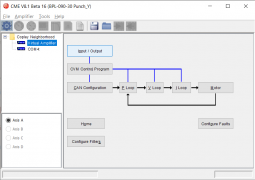
Often we need to communicate with motor controllers from different vendors. Writing software drivers for each one can be a pain and time consuming. Other times we need to use motor controllers utilizing EtherCAT or CANopen, but talking to those drives from our computers is difficult to implement. One solution is using a motion coordinator […]
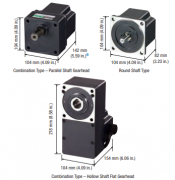
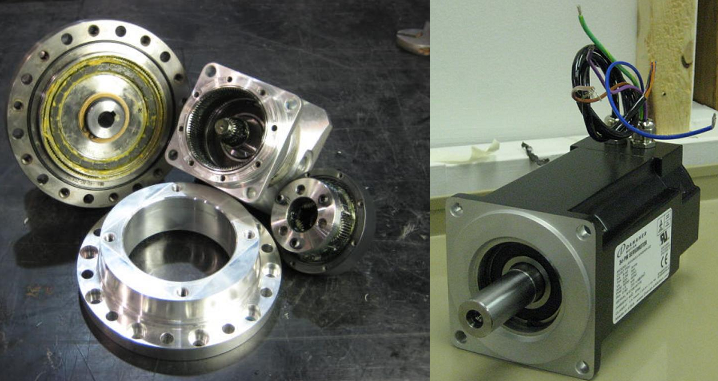
I really like the Oriental Motor motors and gear boxes. The motors work well and they have nice gearbox configurations. In particular I like these for driving wheels on medium size robots. While I really like the products, the company support is lacking. In particular they will not give out the wiring instructions or detailed […]
Lithium battery safety is an important issue as there are more and more reports of fires and explosions. Fires have been reported in everything from cell phones to airplanes to robots. If you don’t know why we need to discuss this, or even if you do know, watch this clip or click here. I am […]
What is a control system? A control system alters the future state of its system to a more desirable outcome. We often work with feedback control systems (also called closed-loop control), where the result of the command is fed back into the control system. In particular we are looking for the error between the command […]
Hi When building a new robot the mechanical engineers always ask me how close can the different antennas be to each other. It is not uncommon to try squeezing 5+ antennas on a single robot (GPS, GPS2 for heading, RTK, joystick, e-stop, communications, etc..). So what is the proper response? The real answer is that […]
Hi all I wanted to write a quick post today about where to place fuses and how to protect your robot. When you design a system it is often tempting to place a fuse on every component. This idea is fine for most batteries, sensors, and computers. However this can really cause destruction when you […]
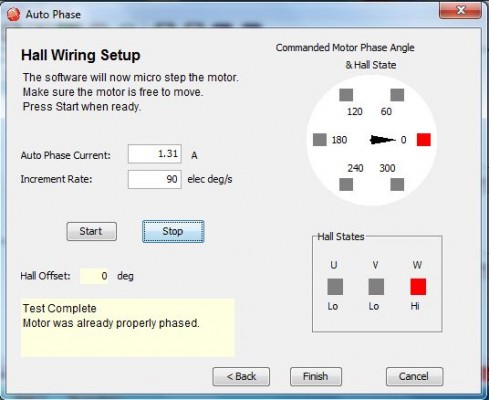
This is just a quick post on controlling DC brushless motors with no encoders. This post applies to brushless motors that typically use hall sensors for commutation. This post does not apply to the hall-less ESC (electronic speed control) motors that typically run at very high speeds and are used for things such as quadcopters […]
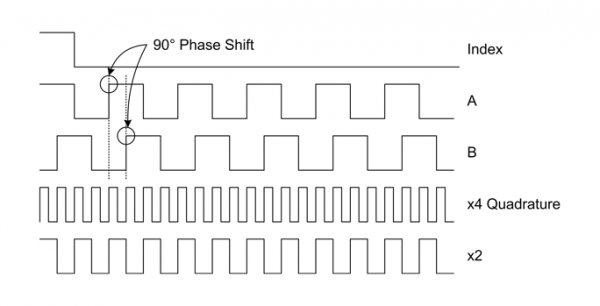
Hi all Just a quick post on incremental encoders. Incremental encoders are good for speed control and can be used for position control when we have a homing routine to get absolute position, or the system is constrained to less than one rotation. One way an incremental encoder can also be an absolute encoder is […]
Hi all Today I want to talk about batteries. However before I begin there are a few terms I want to clarify. So here we go. Terminology Cell – This is where the chemical reaction takes place which produces electricity. The characteristics of the cell are determined by its chemical formulation and its construction. Battery […]
There are a bunch of confusing powers involved when we look at motors, especially with DC brushless motors. When your boss comes and asks you to measure the electrical power that your motor is using, it is often not straight forward. Typically the easiest way to get the current used by a motor is to […]
Ground loops are often discussed but less often understood (I am far from being an expert in this). I have seen several cases where a robot malfunctioned or a sensor did not work due to bad grounding. For example if you have a 0-5V signal and also have a “noisy” ground then the signal can […]
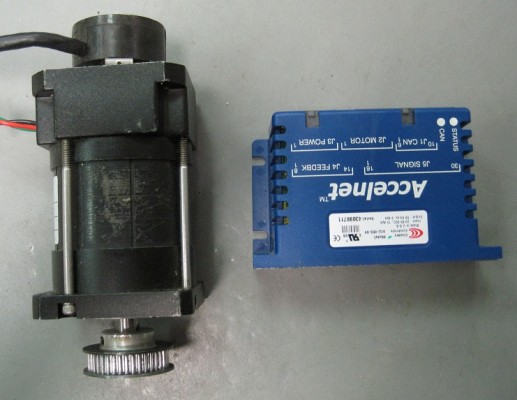
Update: Click here to learn how to configure Copley motor drivers Hi allThis is a post about the Copley Controls motor controllers. For this review I will be using a ACJ-055-09 (55Vmax and 9Apeak) motor controller (I love when product names mean something useful) with a 3 phase DC brushless motor. This is a good […]
Hi all Here are a few soldering tutorials that might be of interest to you. These first two are your day-to-day standard soldering methods. There are many of these types of videos online. This next set of tutorials is for high reliability “proper” soldering techniques. This is actually why I am writing this post. These […]
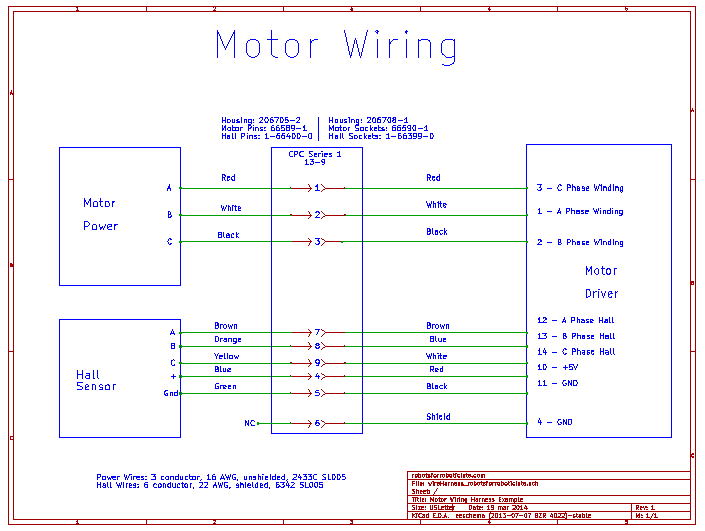
(See full size wire harness diagram here) Hi all So it is time to think about wiring up your robot, one of the key steps before you begin is to develop a wiring diagram. A wiring diagram is not only needed for wiring the robot but is also a valuable resource to have if you […]
Hi all Selecting a motor is a critical task when designing a robot. In a prior post we discussed the different types of motors and feedback options as well as how to control those motors. In this post we will focus on how to size your motor and select the proper gearing. In the main […]
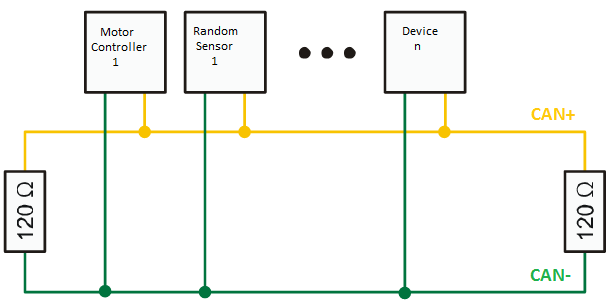
A Controller Area Network, or CAN for short is a common message based protocol used in cars and other vehicles. If you are trying to interface with a car/truck/bulldozer, there is a good chance that you will be reading data its CAN bus, and sending it commands via its CAN bus. It is also used […]
Ahh. Connectors. We love them and we hate them. When you wire a robot there are many places where it can be tempting to take shortcuts to save time and money. Unfortunately connectors often suffer and lose that battle. From experience and many field tests I can not stress the importance of choosing proper connectors […]
Hi all Time. Don’t you wish you had more of it? If you were a robot you would probably be worrying about having consistent time. Why do we need consistent time? In many robots there are multiple systems/computers that are generating and using data, if the systems/computers are not in sync than the result can […]
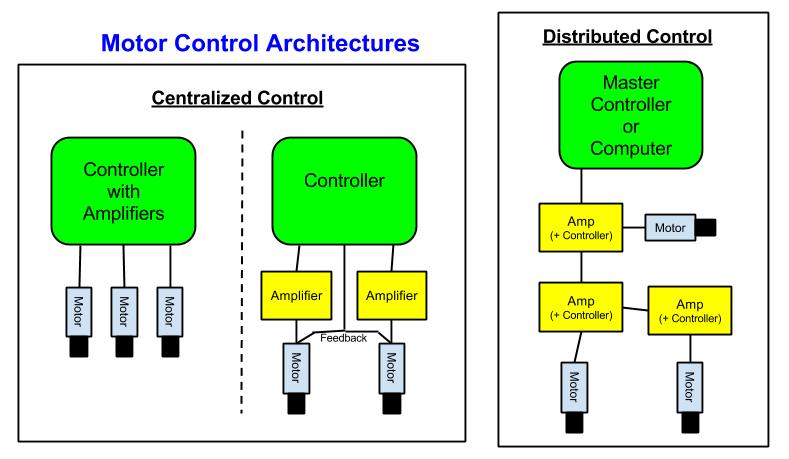
Hi all I recently wrote a post on different types of motors and feedback options, now I want to talk about how to control those motors. Each motor is often refereed to an “axis”, so a 8 axis motor controller can control up to 8 motors. There are two different components used in the control […]
Hi all I got a question about PCB design for robots. I am not going to recreate what is already out there so here are some links. UPDATE: Contextual Electronics has released the entire KiCad course online. Check it out here! The two places that I have used to get PCB’s built are: – Advanced […]
Hi all Just a quick note on e-stops (emergency stops) and m-stops (mobility stops). There are various levels of e-stops. In an ideal world an e-stop would kill power to ALL power, however in complex systems we often settle for less. Some reasons for a weaker e-stop is to keep the computers and other sensors […]
Hi all Here are some books that I like for electronics (including FPGA’s). If you have any favorite electronics book please leave it in the comments below. The first one is the Art of Electronics by Horowitz and Hill. This is a very in-depth book that starts with the basics and ohms law and works […]
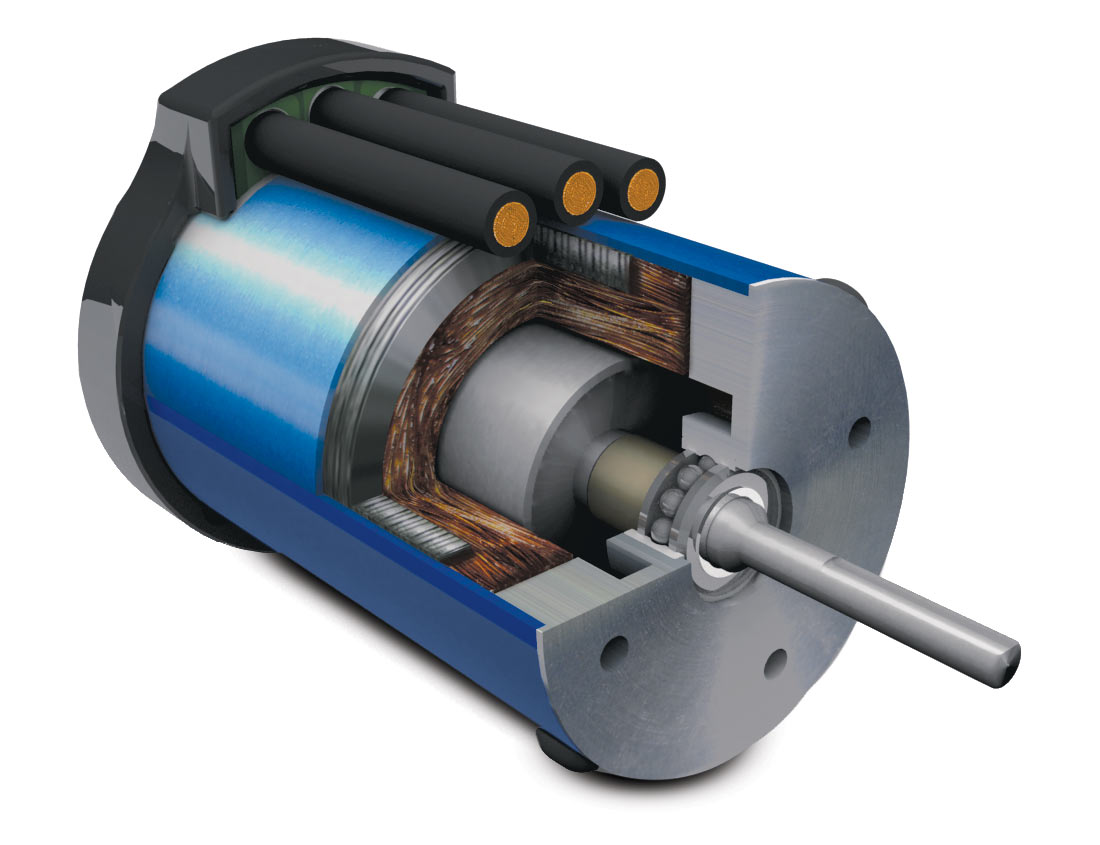
Hi all There are many types of motors and feedback methods to choose from. Which do you need? Keep reading to find out more about selecting your motor stackup. Since most field robots are DC powered I am skipping the many types of AC motors that are out there. In addition to this post you […]