
Wheel & Grouser Design
by David Kohanbash on September 29, 2014
For many robots the wheels are an afterthought however they are essential for letting the robot drive around. Another thing that is often neglected is choosing the proper grousers for your wheel. Most of the design parameters for wheels and grousers are based on experience, intuition (which may or may not be correct) and qualitative assessments.
Serious wheel design is relatively immature, as such treat everything you read here with a grain of salt. Further terra-mechanic models that are often used for determining traction and guiding wheel design are notoriously inaccurate. With all of the things I present here remember to test, test, and test your design to evaluate the different performance specifications in your specific application.
Most of this post will focus on driving in sandy off-road conditions.
Wheel Design
There are many decisions to make when designing a wheel. The most basic that comes to mind is often wheel diameter and wheel width.

Wheel diameter is important because it controls the speed of your robot, the size obstacle the robot can mount, and the gap that the rover can drive over. However it also helps give one dimension of the ground contact patch of the wheel (the part of the wheel that is actually touching the ground), which is important for controlling ground pressure. When operating on soft sandy materials you often want to have a lower ground pressure then when on a paved road (sort of why you want to let a little air out of your car tires when driving on sand). Remember that tracks are just a large wheel, however ground pressure changes based on the type of track you use.
Often people will argue that they can increase the number of wheels and decrease the diameter of the wheel while maintaining equal ground pressure. This is NOT equivalent! Don’t let people tell you it is! Having the larger diameter wheels (within reason) will improve your ability to travel over soft sands. With lots of small wheels you might just sink in the sand.
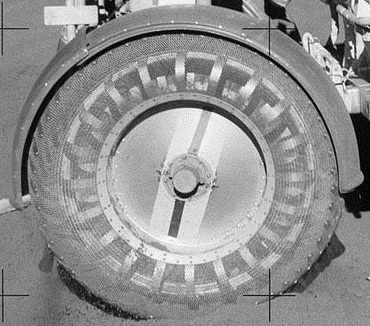
The next thing to consider is a compliant vs non-compliant wheel. A compliant wheel lets the shape of the wheel change based on surface or weight of robot. A compliant wheel is nice since the ground contact patch can be increased, the downside is that the effective diameter is harder to measure and might not be constant (bad for odometry and position estimates). An example of a compliant wheel are the ones on the original lunar exploration vehicles that were used on the moon (see main image above) and car tires. A non-compliant wheel is a rigid wheel that does not deform when in contact with the ground. An example of a non-compliant wheel is a wooden wheel (think horse and buggy).
After the diameter portions of the wheel is designed you need to think about the other parts of the wheel. In particular you want to think if material (sand/soils/rocks) should be able to pass through your wheel. If the interior part of the wheel is solid then soil/sand will buildup on the edge which can hinder mobility and increase power consumption. This is especially pronounced with skid steer vehicles. If the wheel interior is open then sand can enter and exit the wheel. This can be bad if soil/sand gets trapped and you are dragging that extra weight or if your motor is exposed. however this will also reduce the bulldozing that the wheels do when turning (and hence reduce power consumption).
Grouser Design
Grousers are important for engaging the soil/sand in order to utilize some of the soil strength. Grousers can also be helpful for climbing obstacles. The work below is based on sand conditions and you will need to tweak it slightly to optimize it for traveling/climbing over obstacles. By changing the grousers you can greatly change your traction and draw bar pull of your robot.
I should point out there are cases where you might not want grousers such as on pavement (unless you need to move water such as in a car) or in swampy areas. In certain cases not having grousers will consume less power and drive “smoother”.
This next equation was developed by K. Skonieczny, S. Moreland, and D. Wettergreen for use with “small” diameter rigid wheels (as found on planetary robots). However I think it is a good starting point for other wheels also. This equation gives a guide for determining the number of grousers to use and the height of those grousers.

The other big decision about grousers is the shape (or pattern). The general idea is that you want to provide the most engaging surface for the terrain you are operating one. There are many opinions and theories (that are not well tested) about why different patterns are better than other. Here are a couple different types of grouser patterns.

Sources (and good reference papers)
– Test platform for testing wheels and grousers
– Grousing spacing equations and paper from above

Comments
[…] the past we have looked at wheel design and the kinematics of skid steer and mecanum wheels. In this post we will take a quick look at […]
[…] on Mars rover software. The mobility section also has a really nice discussion on wheel issues (See here for more details on wheel design). It is nice to see that they followed Reds Rule when selecting mobility actuators. It would have […]