
Hi all,
This is a new series looking at the detailed design of various robots. To start with we will be looking at the design of two different robots that were used for the DARPA Subterranean Challenge. Both of these robots were designed for operating in complex subterranean environments, including Caves, Mines & Urban environments. Both of these robots presented are from the Carnegie Mellon University Explorer team. While I am writing these posts, this was a team effort that required many people to be successful. (If anyone on Team Explorer is reading this, thank you for everything, you are all awesome.)
These posts are skipping the system requirements step of the design process. See here for more details on defining system requirements.

Ground Robots (UGV)
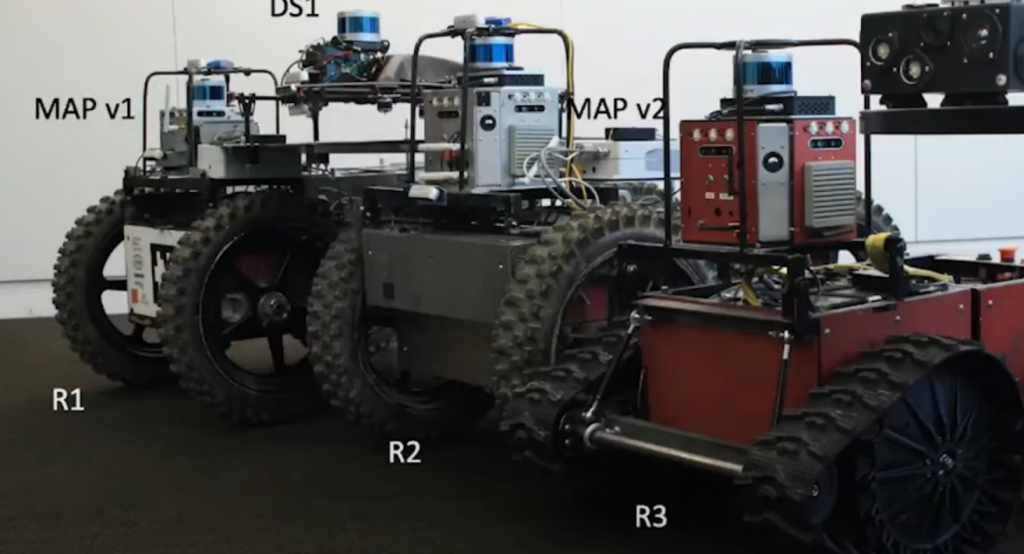
For the SubT challenge three ground vehicles were developed all of a similiar design. The ground robots were known with the moniker of R#, where # is the order we built them in. The primary difference between the three versions are
R1 – Static Chassis, so the chassis has minimal ground compliance when driving over obstacles and uneven surfaces. R1 was initially supposed to have a differencing mechanism for compliance, however due to time constraints it was left out from this first version. R1 is pictured above.
R2 – Has the differencing mechanism and was designed as initially planned.
R3 – Is almost identical to R2, but smaller. This robot was built for navigating smaller areas and also to be able to climb up and down steps. It also uses different motors for the driving the wheels.
Please see the posts below for details on the UGV designs:
- Mechanical & Wheels – Hands On Ground Robot Design
- Power System & Soft Start – Hands On Ground Robot Design
- Motor Controls & Computing – Hands On Ground Robot Design
- Sensor Payload – Hands On Ground Robot Design
DS Drones
The original drone design used by Team Explorer called their drones D1, D2, etc.. This let a combination of UGV +Drone go by joint designations such as R2D2. Early on, the team switched to a smaller drone design that was referred to as DS1, DS2, etc.. Where DS is short for Drone Small.
The drone design post are split into two sections. The first is about the actual drone platform, and the second is about the payload that sat on top of the drone.
Here are the design posts for the drone:
I hope you enjoy this series. I look forward to releasing these posts over the next few weeks. Stay tuned for the posts. Let me know if you like this series, as I can do this for other robotic systems.
Enjoy!
Main image is from https://www.subt-explorer.com/post/fall-2020-update



Pingback: Mechanical & Wheels - Hands On Ground Robot Design - Robots For Roboticists
Pingback: Power System & Soft Start - Hands On Ground Robot Design - Robots For Roboticists
Pingback: Motor Controls & Computing - Hands On Ground Robot Design - Robots For Roboticists
Pingback: Sensor Payload - Hands On Ground Robot Design - Robots For Roboticists
Loved reading this, thanks a lot for sharing David, look forward to the next post!